Merhabalar, bu yazımda Harris feature detector algoritmasını birlikte anlatacağım.
Harris Corner Detektörü, her piksel için her yönde süregelen yerel yoğunluk değişikliklerini ölçeklendirmeye çalışır. Daha genel ifadeyle belirli bi alan içerisindeki piksellerin baskın ortogonal gradyan yönlerinin seçilmesi işlemidir.
Genel hatlarıyla anlatmaya çalışacağım, ayrıca wiki üzerinden bakabilirsiniz genel yapısına. Yazının sonuna yardımcı linkler de ekledim.
Kod yazarken adımlarımız şu şekilde olacak:
1) İlk olarak Gauss filtersi uygula
2) x ve y yönlerinde gradyanlarını bul ve Ix Iy değişkenlerine ata
3) Harris algoritmasını uygulaya
- t değikeninde bir eşik değeri ve W değişkeninde sabit boyutlu pencere tanımla, sonrasında filtrelerle gradyanları (Ix,Iy) hesapla
- Belirlenen pencere(W) içerisindeki tüm piksellerde G matrisini1 hesapla
- Eğer en küçük tekil değer ro(G), t’den büyükse o pikseli feature point olarak işaretle
4) Feature’ların yerlerini orijinal resmin üzerine çizdir.
1G matrisimiz burada: 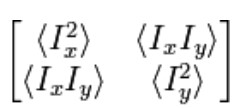
İlk olarak GaussianFilter fonksiyonumuzu yazıp görüntümüzü işleyelim.
def GaussianFilter(img):
# 3x3 Gauss kerneli oluşturuyoruz
kernel = np.ones((3,3), dtype='float64')
size = 3
mean = int(size/2)
sigma = 1 # standart sapmayı 1 olarak aldım
sumAll = 0
for i in range(size):
for j in range(size):
kernel[i,j] = math.exp(-1* ((math.pow( (i-mean)/sigma, 2.0) + (math.pow((j-mean)/sigma, 2.0)) ) / (2* math.pow(sigma,2)) )) / (sigma * math.pow(2*math.pi, 1/2))
sumAll += kernel[i,j]
# normalizing kernel
for i in range(size):
for j in range(size):
kernel[i,j] /= sumAll
# Oluşturulan kernel ile görüntümüzü konvolüsyona tabi tutuyoruz
img = convolution(img, kernel) # filtered image
Son satırdaki konvolüsyon fonksiyonumuz ise:
def convolution(img, dest):
#res = img
[h,w] = img.shape
[kh, kw] = dest.shape # kernel shape
kr = int(kh/2) # kernel radius
res = np.zeros(img.shape)
sumAll2=0
for i in range(0+kr,h-kr):
for j in range(0+kr,w-kr):
for k in range(-1 * kr, kr + 1):
for m in range(-1 * kr, kr + 1):
res[i,j] += dest[k,m]*img[i+k, j+m]
sumAll2+=res[i,j]
res[i,j] /= sumAll2
res[:,0] = res[:, 1]
res[:,w-1] = res[:, w-2]
res[0,:] = res[1,:]
res[h-1,:] = res[h-2,:]
res=res.astype(np.uint8)
return res
İkinci adımımız olan gradyanların hesaplanmasına geliyoruz. Aşağıdaki kod görüntü üzerinde x yönündeki min ve maks gradyanları çizdiriyor. Ardından gradient structure tensor(second-moment matrix) dediğimiz G matrisimizi hesaplıyoruz. Oluşan matrisin trace’ini calculateTrace() fonksiyonuyla hesaplıyoruz. En sonunda başta algoritmada belirttiğimiz t eşik değeri üzerinde olanları calculateThres() fonksiyonu yardımıyla çizdiriyoruz ve çıktımızı alıyoruz.
calculateThres fonksiyonu -> ![]()
![]()
def calculateGradients(img):
[h,w]= img.shape
grad_x = np.zeros((h,w), dtype = 'float64')
grad_y = np.zeros((h,w), dtype = 'float64')
print('Gradyanlar hesaplanıyor')
# piksel piksel türevleri hesaplıyoruz
for i in range(h):
for j in range(w):
if(j >= w-1): # son kolonda
grad_y[i,j] = (img[i,j] - img[i,j-1]) / 2
elif (j== 0): # ilk kolonda
grad_y[i,j] = (img[i,j+1] - img[i,j]) / 2
else: # ilk ve son kolon arasında gezinirken
grad_y[i,j] = (img[i,j+1] - img[i,j-1]) / 2
if(i >= h-1): # son satırda
grad_x[i,j] = (img[i,j] - img[i-1,j]) / 2
elif (i== 0): # ilk satırda
grad_x[i,j] = (img[i+1,j] - img[i,j]) / 2
else: # ilk ve son satır arasında
grad_x[i,j] = (img[i+1,j] - img[i-1,j]) / 2
#gradyanlarımızı kaydetmek için dosya açıyoruz
try:
fP = open(('xgrad.txt'), 'w')
maxGradX = 0
minGradX = 0
maxTuple = [0,0]
minTuple = [0,0]
for i in range(h):
for j in range(w):
fP.write(str(i) + ' ' + str(j) + ' ' + str(grad_x[i,j]) + '\n')
if(grad_x[i,j] > maxGradX):
maxGradX = grad_x[i,j]
maxTuple = [i,j]
if(grad_x[i,j] < minGradX):
minGradX = grad_x[i,j]
minTuple = [i,j]
fP.close()
# Burada yaptığımız şey x yönündeki
# gradyanın minimum ve maksimum değerlerini
# çizdirip kaydetmek
pointed=img.copy()
pointed[maxTuple[0],:] = 255
pointed[:,maxTuple[1]] = 255
pointed[minTuple[0],:] = 2
pointed[:,minTuple[1]] = 2
cv2.imwrite('pointed.jpg', pointed)
except:
print('cannot open file')
structTensor = createStructureTensor(img, grad_x, grad_y)
R = calculateTrace(img, structTensor)
calculateThres(img,R)
def calculateTrace(img,M):
h,w = img.shape
R = np.zeros((h,w), dtype = 'float64')
k = 0.04
for x in range(h):
for y in range(w):
deter = M[x,y,0,0]*M[x,y,1,1] - (M[x,y,1,0] * M[x,y,1,0])
trace = M[x,y,0,0]+M[x,y,1,1]
R[x,y] = (deter - (trace**2)*k)
return R
def calculateThres(img,R):
h,w = img.shape
corners = np.zeros((h,w,3),dtype=np.uint8)
corners[:,:,0]=img
corners[:,:,1]=img
corners[:,:,2]=img
t = 400000
for x in range(h):
for y in range(w):
if R[x,y] > t:
corners[x,y] = [0,254,0]
print(str(x) + ' ' + str(y) + ' ' + str (R[x,y]))
# Köşeleri bulunmuş görüntümüzü çıktı olarak alıyoruz
cv2.imwrite('result.jpg', corners)
def createStructureTensor(img,Ix,Iy):
h,w = img.shape
structTensor = np.zeros((h,w,2,2),dtype='float64')
Ixx = Ix*Ix
Ixy = Ix*Iy
Iyx = Iy*Ix
Iyy = Iy*Iy
for x in range(h):
for y in range(w):
for i in range(-1,2):
for j in range(-1,2):
if not(x+j<0 or x+j >= h or y+i <0 or y+i >= w):
structTensor[x,y,0,0]+=Ixx[x+j][y+i]
structTensor[x,y,0,1]+=Ixy[x+j][y+i]
structTensor[x,y,1,0]+=Iyx[x+j][y+i]
structTensor[x,y,1,1]+=Iyy[x+j][y+i]
return structTensor
import math
import numpy as np
import cv2
path="lena.jpg"
inputImage = cv2.imread(path,cv2.IMREAD_GRAYSCALE)
filtered = GaussianFilter(inputImage) # Birinci adım
calculateGradients(filtered) #İkinci ve üçüncü adım
Yardımcı linkler:
https://en.wikipedia.org/wiki/Structure_tensor
https://www.youtube.com/watch?v=P35WsRDnTsU&t=41m12s
https://docs.opencv.org/3.4/d4/d70/tutorial_anisotropic_image_segmentation_by_a_gst.html
https://docs.opencv.org/3.4.2/dc/d0d/tutorial_py_features_harris.html